

产品中心
-
产业机器人
产业机器人
点击查看产品类别
> -
工件夹持与定位
工件夹持与定位
点击查看产品类别
> -
工厂自动化
工厂自动化
点击查看产品类别
> -
电子电器
电子电器
点击查看产品类别
> -
非标定制
非标定制
点击查看产品类别
>


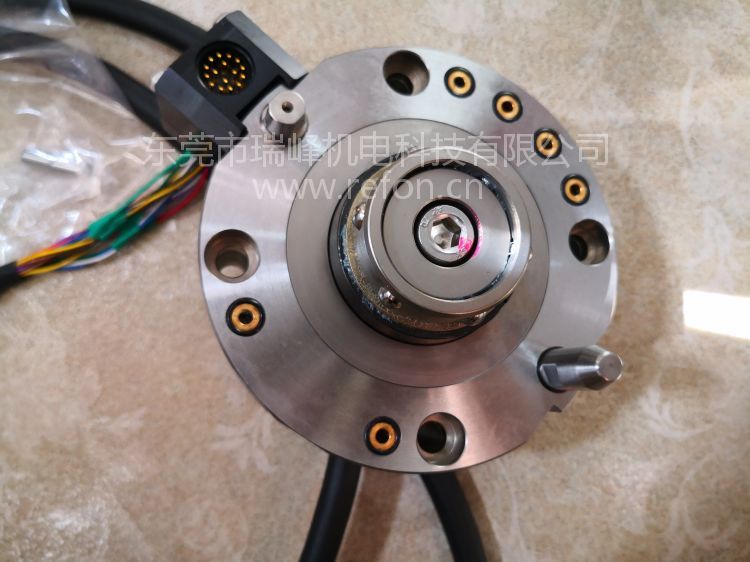





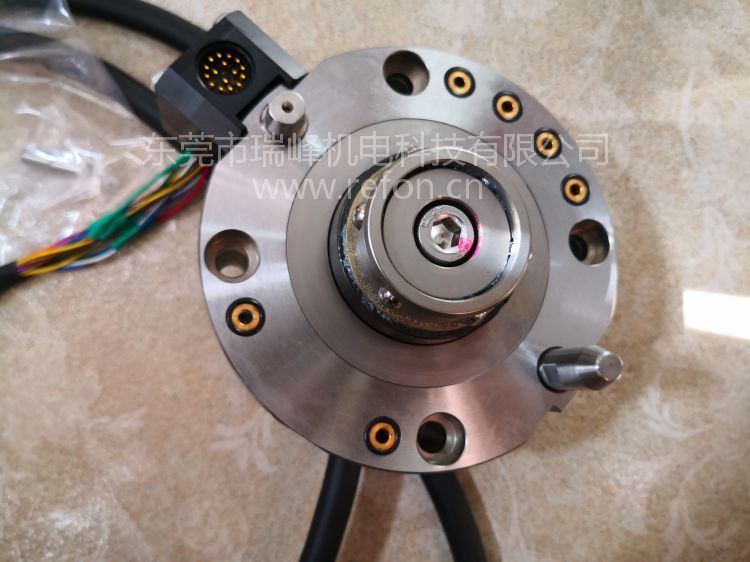
KOSMEK考世美自动化机械手工具快换装置SWR0500-MA-U02配套SWR0500-T-U02
品牌:KOSMEK考世美
规格型号:SWR0500-MA-U02,SWR0500-T-U02
性能简述:KOSMEK考世美自动化机械手工具快换装置SWR0500-MA-U02配套SWR0500-T-U02 采用高精度机械手快换装置,可实现机器人多功能化(通用化) 大大缩短工具的更换时间,提高生产率。 丰富的型号:
咨询热线:
15818598199
详细介绍
KOSMEK考世美自动化机械手工具快换装置SWR0500-MA-U02配套SWR0500-T-U02
型号表示


规格参数
实物图



采用高精度机械手快换装置,可实现机器人多功能化(通用化)
大大缩短工具的更换时间,提高生产率。
丰富的型号:3kg , 7kg , 12kg , 25kg , 50kg , 75kg , 120kg , 230kg
高精度:3 μm / 高刚性:间隙为 “0“ / 长寿命:200万次以上
连接部逛量为零,有效防止了偏芯和振动的现象。
通过可动式锥套的两面约束定位,实现了零间隙无逛量。有效防止作业载荷造成偏芯和振动,大幅提高作业品质。
防止电极部的通信错误造成的偷停现象。
机械手快换装置本体的逛量为零电极的振动极小,可防止电噪声和磨耗。
综上所计,通过高信赖度的电极可有效防止通信错误造成的偷停现象。
防止工具掉落的机械式自锁功能
因停电等原因,即使供给气压变为零,也可以通过弹簧的机械式自锁功能有效防止工具的掉落,所以安全性很高。
※ 通常时以弹簧力 + 供给气压实施连接动作
高精度的位置还原精度0.003mm
位置还原精度 3μm 以内
通过可动式锥套的两面约束方式,实现高精度的定位。
工具侧前端偏心量小,可实现高精度的作业。
通过提升功能(解除锥面结合)保护定位机构部
连接过程中提升功能可以有效防止定位机构部(着座面与锥形定位面)发生碰撞。
分离时,由活塞杆顶起工具侧,防止因热粘而导致的偷停现象。
即使长手臂抖动也极小
无逛量且重复定位精度为 3μm,所以长手臂夹抓等的错位也极小,有效防止工件的误抓取,并且有效规避了搬送时错位引起的干涉。
型号表示
规格参数
| 型号 | SWR0030 | SWRY0010 | SWR0070 | SWR0120 | SWR0250 | SWR0500 | SWR0750 | SWR1200 | SWR2300 | ||||
|
0.5MPa 时 kg 可搬运重量 ※1 0.7MPa 时 kg 1MPa 时 kg |
3 | 7 | 12 | 25 | 50 | 75 | 120 | 230 | |||||
| - | - | - | - | - | - | - | 360 | ||||||
| 6 | 12 | 20 | 45 | 90 | 140 | 200 | - | ||||||
| 位置还原精度 | mm | 0.003 | |||||||||||
| 提升量 ( 顶升量) mm | 0.8 | 0.8 | 0.8 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | |||||
| 夹紧器容量 |
夹紧 释放 |
cm3 cm3 | 0.64 | 1.50 | 2.38 | 6.08 | 14.38 | 22.98 | 38.44 | 89.54 | |||
| 0.72 | 1.72 | 2.69 | 6.68 | 15.39 | 25.45 | 42.76 | 100.73 | ||||||
|
最高使用压力 驱动气压 最低使用压力 耐压 |
MPa MPa MPa |
1.0 | 1.0 | 0.7 | |||||||||
| 0.4 | 0.35 | 0.35 | |||||||||||
| 1.5 | 1.5 | 1.05 | |||||||||||
| 联结保持力 | 参照第26页 | 参照第70页 | 参照第 26 页 | 参照第26页 | |||||||||
| 提升力 ( 顶升力) | 参照第26页 | 参照第70页 | 参照第 26 页 | 参照第26页 | |||||||||
| 容许静态 力矩 ※1 | 弯曲方向 (0.5MPa 时) N・m 弯曲方向 (1.0MPa 时) N・m 旋转方向 N・m | 5 | 14 | 27 | 74 | 194 | 380 | 725 | 1800 | ||||
| (10) | (25) | (45) | (135) | (350) | (700) | (1400) | - | ||||||
| 15 | 12 | 23 | 45 | 100 | 175 | 300 | 700 | 1400 | |||||
| 最大负载 力矩※2 | 弯曲方向 (0.5MPa 时) N・m 弯曲方向 (1.0MPa 时) N・m 旋转方向 N・m | 10 | 28 | 54 | 148 | 388 | 760 | 1450 | 3600 | ||||
| (20) | (50) | (90) | (270) | (700) | (1400) | (2800) | - | ||||||
| 30 | 24 | 46 | 90 | 200 | 350 | 600 | 1400 | 2800 | |||||
| 使用温度 | ℃ | 0 ~ 70 | |||||||||||
| 使用流体 | 干燥空气 | ||||||||||||
| 产品重量 ※3 |
主夹紧器 工具适配器 |
g g |
70 | 85 | 180 | 250 | 500 | 1000 | 1650 | 3800 | 7100 | ||
| 45 | 60 | 120 | 160 | 300 | 750 | 1100 | 2600 | 4800 | |||||
| 供气口的数量 ※4 螺纹尺寸 × 气口数 |
M3×0.5×2 气口 ※5 |
M3×0.5×6 气口 | M5×0.8 ×6 气口 | M5×0.8×6 气口 | M5×0.8×6 气口 | M5×0.8×2 气口 Rc1/8×4 气口 |
Rc1/8×9 气口 |
Rc1/4×9 气口 |
Rc3/8×10 气口 |
||||
|
供气口的 最小通路面积 |
5 5 |
选择无符号时 选择 S 时 |
mm2 mm2 |
1.1 (φ1.2 相当) |
1.1 (φ1.2 相当) |
2.0 (φ1.6 相当) |
2.0 (φ1.6 相当) |
2.0 (φ1.6 相当) |
7.1 (φ3.0 相当) |
7.1 (φ3.0 相当) |
63.6 (φ9.0 相当) |
63.6 (φ9.0 相当) |
|
| - | - |
1.7 (φ1.5 相当) |
1.7 (φ1.5 相当) |
1.7 (φ1.5 相当) |
3.4 (φ2.1 相当) |
3.4 (φ2.1 相当) |
13.0 (φ4.1 相当) |
13.0 (φ4.1 相当) |
|||||
| 电极选配项规格 | 参照第 37~ 66 页 | ||||||||||||
| 调教作业时的容许位置误差 | 参照第 78 页 | ||||||||||||
实物图






 在线客服
在线客服